08 Linear Regression
in Notes / Dataanalytics / Datascience
Introduction
- linear model:
- set of lines
- good first choice because
- 1) Small VC (Vapnik-Chervonenkis) dimensions
- 2) Generalize well (even with test data)
- Three Important Problems in Machine Learning
- Classification \(\rightarrow\) PLA
-
Regression \(\rightarrow\) this chapter
- Logistic Regression (Probability Estimation) \(\rightarrow\) beginning of Deep Learning
Regression
- statistcal method to study relationship between \(x\) and \(y\):
- \(x\): aka covariate / predictor variable / independent variable / feature
- \(y\): aka response / dependent variable / Ground Truth
- Training Data \((x_1, y_1), ..., (x_N, y_N)\)
- assume that noise is in our data (\(\rightarrow\) learning more practical )
- Noise \(\epsilon\) added to target: \(y_n = f(x_n) + \epsilon\)
- \(y \tilda P(y\mid x)\) instead of \(y=f(x)\)
- GOAL: find model \(g(x)\) that approximates \(y_n\)
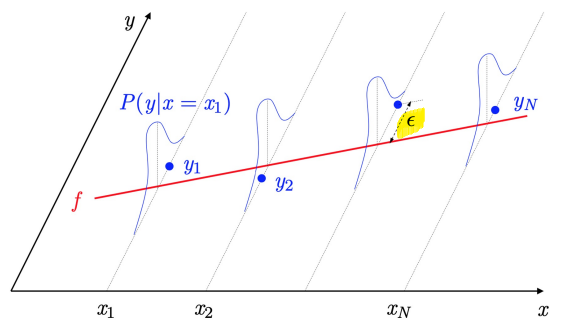
- \(y_i\) = \(f(x_i) + \epsilon\)
assumption: homoscedasticity (each variance are same)
- \(re\) (back) + \(gression\) (going) = going back from data to formul - Sir Francis Galton
- regression towards the mean
Linear Regression
- popular linear model for predicting quantitative response
- applies to real-valued target functions
- Types of Linear Regression
- simple linear regression ( \(d=1\) ) : one predictor \(\leftarrow\) learn this right now
- multiple linear regression: ( \(d>=2\) ) : multiple predictor
- how to solve linear regression problem:
- Least Squares
- (
OLS)Ordinary Least Squares - Generalized Least Squares:
homoscedasticity X - Iteratively Reweighted Least Sqaures:
no need for invert matrix
- (
- Maximum Likelihood: Ridge/Lasso, Least Absolute…etc
- Others : Bayesian, Principle…etc
- Least Squares
- Example: Credit Approval Revisited
- regression problem (rather than classification) (
ex:set credit limit for each customer) - bank uses historical records to build dataset \(\mathbb{D}\)
- \(\mathbb{D}\): \((x_1,y_1), ..., (x_N, y_N)\)
- \(x_n\): customer information
- \(y_n\): credit limit (set by human experts) \(\leftarrow\) real number
- \(g\): what we are looking for (how human experts determine credit limits)
- target: not deterministic function \(y=f(x)\), but \(NOISY\) Target (there is more than one human expert)
- formalized as a distribution of a random variable
- target: not deterministic function \(y=f(x)\), but \(NOISY\) Target (there is more than one human expert)
- \(y_n\) (Regression Label) from \(P(y\mid x)\) instead of \(f(x)\)
- regression problem (rather than classification) (
Linear Regression Algorithm
\[E_{out}(h) = \mathbb{E}[(h(x)-y)^2]\]- minimizing (expected value of error) squared error between \(h(x)\) and \(y\)
- using
MSE(\(w^Tx-y\)) - GOAL: find \(h\) that achieves a small \(E_{out}(h)\)
- Issue: \(E_{out}\) cannot be computed (\(P(x,y)\) is unknown)
- \(\Rightarrow\) turn to in-sample error
\(E_{in}(h) = \frac{1}{N}\sum_{n=1}^N(h(x_n)-y_n)^2\)
- instead of using estimated error, use average of error
- In linear regression, \(h\) takes form of linear combinations of components of \(x\):
- \[h(x) = \sum_{i=0}^dw_ix_i = (w^Tx)\]
- \((w^Tx)\) aka signal
- \(\rightarrow\) in-sample error can be re-written:
- \(E_{in}(h)\)=\(\frac{1}{N}\sum_{n=1}^N(w^Tx-y_n)^2\)
- find optimal
w
- Linear Model Conditions
- \(E_{in}\) \(\approx E_{out}\)
- \(E_{in}\) is small enough
Matrix Representation
\(X=\begin{bmatrix} 1, x_1\\1, x_2\\1, x_3\\1, x_4\end{bmatrix}, w = \begin{bmatrix}w_0\\w_1\end{bmatrix} y = \begin{bmatrix}y_1\\y_2\\y_3\\y_4\end{bmatrix}\)
- \(y = xw \Rightarrow\) linear model!
- in-sample error = function of \(w\) and data \(X, y\):
- (1) \(E_{in}(w) = \frac{1}{N}\sum_{n=1}^N(w^Tx-y_n)^2\)
- (2) \(=\frac{1}{N} \left\lVert\begin{bmatrix}x_2^Tw-y_2\\x_1^Tw-y_1\\...\\ x_n^Tw-y_n\\\end{bmatrix} \right\rVert^2\)
- \(\left\lVert \cdot \right\rVert\): Euclidean norm of vector
- (3) \(= \frac{1}{N}\left\lVert xw-y \right\rVert^2\)
- = \(\frac{1}{N}((xw-y)^T(xw-y))\)
- = \(\frac{1}{N}((w^Tx^T - y^T)(xw-y))\)
- = \(\frac{1}{N}(w^Tx^Txw - w^Tx^Ty - y^Txw + y^y)\)
- (4) \(\frac{1}{N}(w^Tx^Txw - 2w^Tx^Ty + y^y)\)
- tip (\(y^TXw = (w^TX^Ty)^T = w^TX^Ty\))
Example
\[X=\begin{bmatrix} 1, x_1\\1, x_2\\1, x_3\\1, x_4\end{bmatrix}, w = \begin{bmatrix}w_0\\w_1\end{bmatrix} y = \begin{bmatrix}y_1\\y_2\\y_3\\y_4\end{bmatrix}\]- \[E_in(w)=\frac{1}{4} \sum_{i=1}^4(w^Tx_n-y_n)^2\]
- = \(\frac{1}{4} \left\lVert \begin{bmatrix} 1, x_1\\1, x_2\\1, x_3\\1, x_4\end{bmatrix} \begin{bmatrix}w_0\\w_1\end{bmatrix} - \begin{bmatrix}y_1\\y_2\\y_3\\y_4\end{bmatrix} \right\rVert^2\)
- tip (\(y^TXw = (w^TX^Ty)^T = w^TX^Ty\))
- (5) \(w_{lin} = argmin(E_{in}(w))\) (\(w_{lin}\) = solution)
- (6) \(argmin \frac{1}{N} \left\lVert Xw-y \right\rVert^2\)
Minimization
- equation (4) implies \(E_{in}(w)\) is continous, differentiable, convex
- \(\Rightarrow\) use standard matrix calculus to find \(w\) that minimizes \(E_{in}(w)\) by requiring \(▽E_{in}=0\)
- other (
gradient descent ) also works
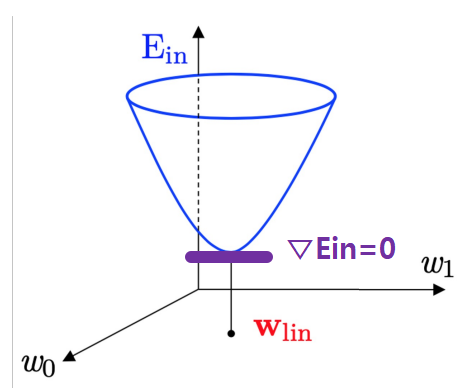
- \(w_{lin}\): optimal value of \(w\)
- Recall:
- Gradient identifies:
- \(▽_w(w^TAw)\)=\((A+A^T)w\)
- \(▽_w(w^Tb)\)=\(b\)
- scalar \(w\)
- \(E_{in}(w)\) = \(aw^2-2bw+c\)
- \(\frac{∂}{∂w}E_{in}(w)\)= \(2aw-2b\)
- vector \(w\)
- \(E_{in}(w)\) = \(w^TAw-2w^Tb+c\)
- \(▽E_{in}(w)\) = \((A+A^T)w - 2b\)
- Gradient identifies:
- Solution
- from equation (4) \(\frac{1}{N}(w^Tx^Txw - 2w^Tx^Ty + y^y)\)
- \(▽E_{in}(w)\) = \(\frac{2}{N}(X^TXw-X^Ty)\) set to
0- both \(w\) and \(▽E_{in}(w)\) = column vectors
- solve for \(w\) that satisfies the normal equations
- \(X^TXw\) = \(X^Ty\)
- \(w =\) \((X^TX)^{-1}X^Ty\)
if\(X^TX\) is invertible, \(w=X^+y\) (mostly invertible)- (\(X^+\) (pseudo-inverse of X) = \((X^TX)^{-1}X^T\))
- \(\Rightarrow w\) =
unique optimal solution
elsepseudo- inverse can still be defined but no unique solution- \(\Rightarrow\)
multiple solutions for \(w\) that minimizes \(E_{in}\)
- \(\Rightarrow\)
- Example
Data
- (20 rows each) data matrix \(X = \begin{bmatrix} 1, 0.99\\1,1.02\\1,1.15\\...\\1,0.95\end{bmatrix}\), target vector \(y= \begin{bmatrix}90.01\\89.05\\91.43\\...\\87.22 \end{bmatrix}\)
- \(X^TX\) is invertible
- \(X^TX\) = \(\begin{bmatrix}20.00, 23.92\\23.92,29.29 \end{bmatrix}\Rightarrow (X^TX)^{-1}=\begin{bmatrix}2.15,-1.76\\-1.76,1.47\end{bmatrix}\)
- \((X^TX)X^Ty\) yields
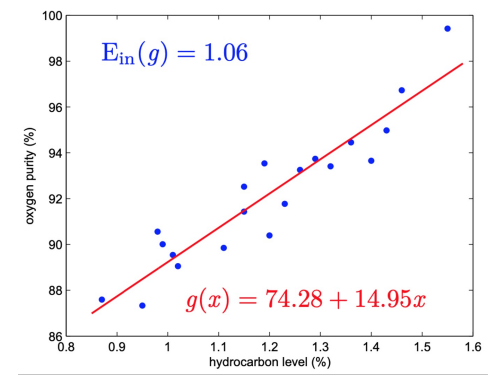
- \(w_{lin}\) = \(\begin{bmatrix}74.28\\14.95\end{bmatrix}\)
- learned model:
- \(g(x)\)
=\(w_{lin}^Tx\)=\(74.28+14.95x\)
- \(g(x)\)
- error: (안배움)
- \(E_{in}(g)\) = \(1.06\)
- \(E_{out}(g)\) \(\approx 1.45\)
Comments
- linear regression algorithm (aka
OLS(ordinary least squares)) - provides
BLUE(Best Linear Unbiased Estimator) - compared to PLA, doesn’t really look like learning
- hypothesis \(w_{lin}\) comes from analytic solution(matrix inversion/multiplications) rather than iterative learning steps
- one-step learning \(\Rightarrow\) popular
- Linear Regression is a rare case
- there are methods for computing pseudo-inverse w/o interting a matrix
Interpretation via Hat Matrix
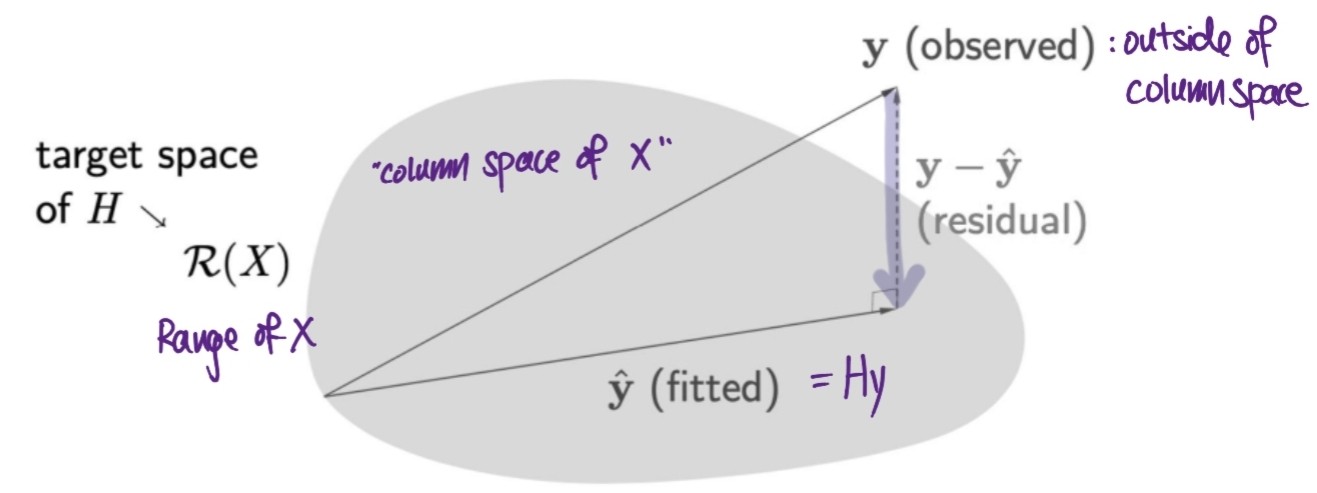
Hat Matrix (H) (aka projection matrix)
- maps observed values (\(y\)) to fitted values(\(\hat{y}\))
- \[\hat{y} = Hy\]
matrix \(H\)
puts a haton \(y\)- Hat matrix in Linear Regression
- linear regression weight vector \(w_{lin}\) attempts to map inputs \(X\) to outputs \(y\)
butdoes not produce \(y\) directly (only the estimate) due to ___ error- substitue expression for \(w_{lin}\) (assuming \(X^TX\) is invertible)
- \(w_{lin}\) = \((X^TX)^{-1}X^Ty\)
- and \(\hat{y}\) = \(Xw_{lin}\)
- substitute \(\Rightarrow\)
- \[\hat{y}= Xw_{lin} =X\cdot(X^TX)^{-1}X^Ty\]
- \[\hat{y}= \Longrightarrow(X(X^TX)^{-1}X^T) \Longleftarrow y\]
- \(\Rightarrow H = X(X^TX)^{-1}X^T\) : Hat matrix is actually a linear function
\(\hat{y}\) : orthogonal projection of \(y\) on to the Range of X
- \(H\) is called projection/hat matrix
iff\(H^2 = H\) (HHy=Hy, HHHHy=HY…) - basic properties of hat matrix \(H\)
- symmetric: \(H^T=H\)
- idempotent: \(H^N=H\) (no effect on vectors already on space)
- for identy matrix \(I\):
- \(I-H\) = also hat matrix
- \((I-H)^2\)
=\(I-2H+H^2\)=\(I-H\) - \(H^T(I-H) = 0 \Rightarrow\) target spaces are orthogonal
- trace
- \(trace(H)\) = \(trace(X(X^TX)^{-1}X^T)\)
- = \(trace(X^TX(X^TX)^{-1})\)
- = \(trace(I)\)
- = \(d+1\)
for matrix \(A\), \(trace(A)\) = sum of diagonal \(\begin{bmatrix}O,-,-\\ -,O,-\\ -,-,O \end{bmatrix}\)
- since \(trace(H)\) = sum of diagonal elements in \(H\):
- \(\Rightarrow\) \(trace(AB) = trace(BA)\)