11 Regularization
in Notes / Dataanalytics / Datascience
Introduction
- Noise: part of \(y\) we cannot model

- noises (stoch/deter.) lead to overfitting (learning에 피해줌)
- Humans: extract simple patterns (ignore \(noise\) and complications)
- but computers: 모든 픽셀에 대해 같은 기준을 가지고 판단
- \(\Rightarrow\) we need to simplify for them
feature extraction, regularization, attention
- \(\Rightarrow\) we need to simplify for them
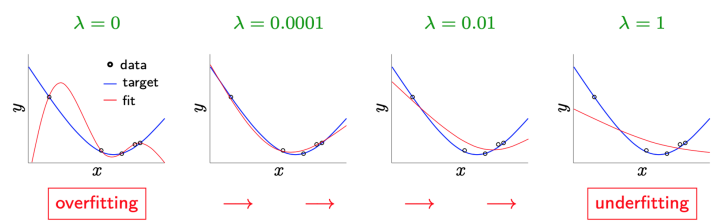
Overfitting
- consequences:
- Fitting observation (training error, \(E_{in}\)) no longer indicates decent test error (\(E_{out}\))
- \(E_{in} \approx E_{out} \leftarrow\)best
- \(E_{in}\) no longer good guide for learning
- Fitting observation (training error, \(E_{in}\)) no longer indicates decent test error (\(E_{out}\))
observed when:
- model too complex to represent target (필요 이상으로)
- model uses its additional DOF (Degree of Freedom) to fit noise in data
like increasing number of features (increasing number of w in linear model w^Tx) - small # of data \(\rightarrow\) (not enough data) easy to learn model
- \(\Rightarrow\) few-shot (using only use small number of data) / zero-shot learning
- overfitting을 잘 다루는 것이 전문가와 아마추어의 차이
Regularization
improving \(\hspace{0.1cm} E\_{out}\)
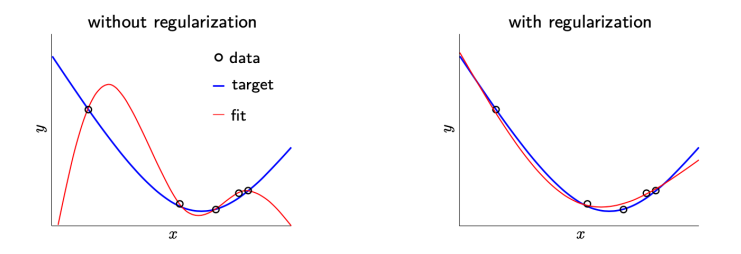
overfitting: \(f \neq g \rightarrow\) sample error \(\uparrow\)
side effects: may become incapable of fitting \(f\) faithfully
Strategies:
- put extra constraints
(ex: add restrictions on parameter values) - add extra terms in objective function
(like soft constraint on parameter values) - combine multiple hypotheses that explain training data
(aka ensemble methods) - extra constraints/penalties requires Domain knowledge & preference for simpler model
- put extra constraints
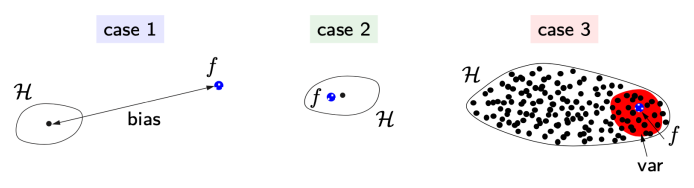
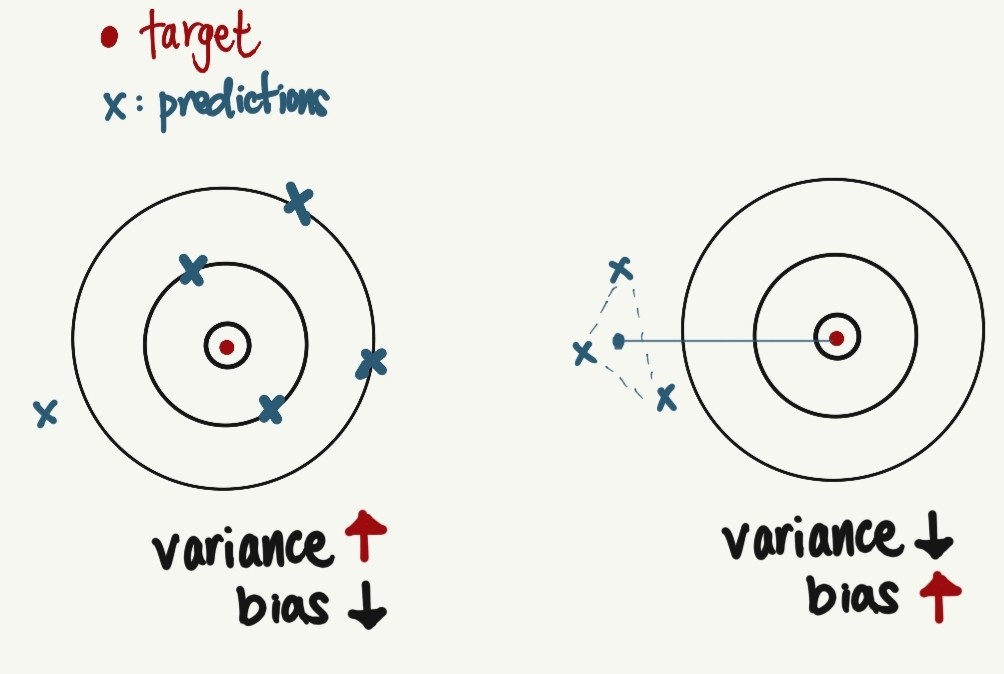
| case | model | main error | phenomenon |
|---|---|---|---|
| 1 | exclude \(f\) | bias | underfitting |
| 2 | match \(f\) | ||
| 3 | include \(f\) but many others | variance | overfitting |
- GOAL:
case #3\(\Rightarrow\)case #2
Theory of Regularization
Regularization: process of introducing additional information to solve problem or overfitting
(restrictions for smoothness or bounds on vector space norm) - example: \(z= \theta _0 + \theta _1x_1 + \theta _2x_2 + \theta _3x_3 + \theta _4x_4 + \cdots + \theta _{5000} x_{5000}\)
- too many features \(\rightarrow\) remove some by making \(\theta\) into zero
Approaches:
- Mathematical: function approximation
- Hueristic: handicapping minimization of \(E_{train}\)
Generalization bound Review:
- \(f\): unknown target function (objective of learning)
- \(g\): our (best) model learned from data (one of \(h\subset \mathcal{H}\))
- \(\mathcal{H}\) : hypothesis set from which we choose \(g\)
Hypothesis Set
- VC generalization bound (외울 필요X)

- (3 variables) \(N\): # of examples, \(d_{VC} \approx\) complexity of model
\(\Rightarrow E_{out}(h) \leq E_{in}(f) +\) \(\Omega(\mathcal{H})\) for all \(h\in \mathcal{H}\)
- \(E_{out}\) bounded by penalty \(\Omega(\mathcal{H})\) on model complexity
- VC BOUND: \(E_{test}(h) \leq E_{train}(f) + \Omega(\mathcal{H})\) for all \(h\in \mathcal{H}\)
- \(\Rightarrow\) GOOD, can fit data using simple \(\mathcal{H}\)
- REGULARIZATION: even better, can fit using simple \(h\in \mathcal{H}\)
- find \(\Omega(h)\) for each \(h\)
- minimize BOTH \(E_{in}(h)\) and \(\Omega(h)\) (원래: \(E_{in}(h)\)만 minimize 했었음)
- \(\Rightarrow \Omega(\mathcal{h})\)도 이제는 최적화해야할 부분 \(\rightarrow\) avoid overfitting by constraining learning process!
- \(N\) 이 커질수록 regularization 필요없어짐 \(\rightarrow \frac{1}{N}\) 빼버리기 \(\Rightarrow\) optimal \(\lambda\) less sensitive to \(N\)
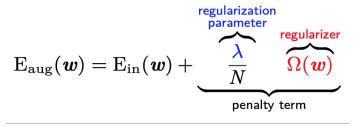
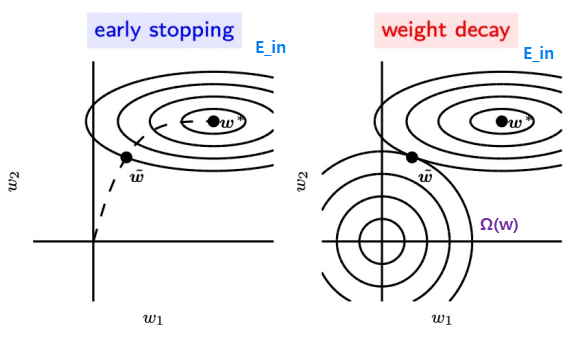
ex: Weight Decay Regularizer : minimize \(E_{train}(w)+\) \(\frac{\lambda}{N}w^Tw\)
one more term added - A member of even a large model family can be appropriately regularized
- How to select \(\Omega\) and \(\lambda\)
- regularizer \(\Omega \leftarrow\) heuristic
(주로 data보기도 전에 fixed) - parameter \(\lambda \leftarrow\) principled :
- 주로 depends on data
- overdose \(\Rightarrow\) underfitting (validation이 알려줄 것임)
- regularizer \(\Omega \leftarrow\) heuristic
Regularization Techniques
1. Norm Penalties
\(midterm\) : PROS & CONS of these
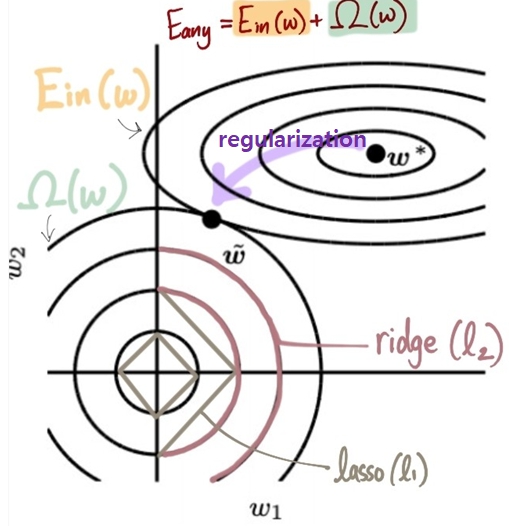
- most famous: \(l_1\) and \(l_2\) regularizers
- Lasso - \(l_1\) regularizer
- convex but not differentiable everywhere
- variable shrinking + selection \(\Rightarrow\)
sparse solution - \[\Omega(w)= \parallel w \parallel _1 = \sum _q \mid w_1 \mid\]
- problem: \(\mid w_q \mid \rightarrow V\) shaped, not differentiable at some point
- Ridge (statistics) - \(l_2\) regularizer
- math friendly (convex / differentiable)
- no sparse solution
- variable shrinking only (shrink \(w\)’s of correlated \(x\)’s)
- \[\Omega(w)= \parallel w \parallel _2 = w^Tw = \sum _q w^2_q\]
- \(E_{aug}(w) \hspace{1cm}=\) \(E_{in}(w)+\frac{\lambda}{N}\Omega(w) \hspace{1cm}= E_{in}(w)+\frac{\lambda}{N}\) \(w^2\)
- goal: minimize \(E_{aug}\), but \(w\) can be further minimized if \(\lambda\) (parameter) gets increased
if\(w\) gets minimized,thenmore likely features disapper (w=0) \(\rightarrow\) increase linearity (regularize and reduce overfitting)
-
weight decay meaning - \(w \leftarrow\) \(w-\epsilon \nabla E_{aug}(w)\)
\(E_{aug}(w)= E_{in}(w)+(\frac{\lambda}{N}\Omega(w))\) - \(\hspace{0.1cm} =\) \(w-\epsilon \nabla E_{train}(w) -2\epsilon \frac{\lambda}{N} w\)
- \(\hspace{0.1cm} =\) \((1-2\epsilon \frac{\lambda}{N})\)\(w-\epsilon \nabla E_{train}(w)\)
- \(w \leftarrow\) \(w-\epsilon \nabla E_{aug}(w)\)
- another analysis of weight decay
- rescale \(w^*\) along the axes defined by eigenvector of \(H \Rightarrow \widetilde w\): optimized \(w\)
- Scale factor for
ith eigenvector: \(\frac{eigenvalue(H)_i}{eigenvalue(H)_i + \lambda}\) - \(w_1\) direction (\(\leftrightarrow\)): eigenvalue \((H)_1\) small \(\rightarrow\) no strong preference
- \(w_2\) direction (\(\updownarrow\)): eigenvalue \((H)_2\) large \(\rightarrow\) affects this direction a little
- Tkhonov Regularizer
- Generalization of weight decay (make \(\alpha \neq 1\leftarrow\) not sure)
- \(\Omega(w) =\) \(w^T\Gamma ^T \Gamma w = \sum _p \sum _q w_pw_q\gamma _p \gamma _q\)
- Elastic-net penalty
- lasso (\(\alpha = 1\) ) + ridge (\(\alpha = 0\) )
- \[\Omega(w) = \sum _q {\alpha \mid w_q \mid + \frac{1}{2}(1-\alpha) w^2_q}\]
- Comparisons
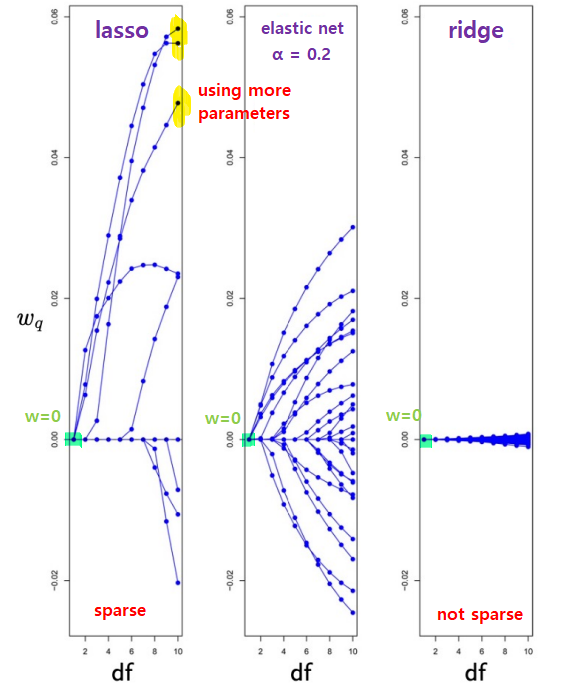
- DF: Degree of freedom (클수록 can use many parameters)
- \(\lambda\) \(\Omega(w)\)
- \(\lambda\) 클수록 not used by \(w\) (\(w=0\))
- 낮으면 \(w\)가 parameter ( \(\lambda\) )사용할 것 ????
2. Early Stopping
- overfitting: \(E_{in} \searrow\) but \(E_{val} \nearrow \longrightarrow E_{val}\)이 낮아지면 멈춰버리면 어떨지?
-
Early Stopping : keep track of both \(E_{in}\) and \(E_{val}\)
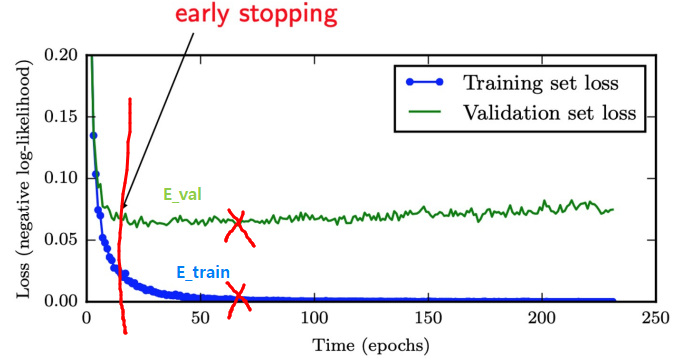
- stop training with lowest \(E_{val} \Rightarrow\) potentially better \(E_{out}\)
- effective/simple \(\rightarrow\) popular in machine learning
- Every time error on validation set improves
- store copy of parameters (returned when terminated)
- Algorithm terminate when no improvement in \(E_{val}\)
- Advantages:
- unnoticeable (weight decay: \(E_{in}-\Omega(w)\) 중 \(\Omega(w)\) 가 없는 셈)
- Early Stop \(\Rightarrow\) fewer epochs \(\Rightarrow\) computational savings
- leave extra data for additional training
- Disadvantages:
- 주기적으로 \(E_{val}\) compute 해줘야 함 (validation error이 많으면 inefficient) \(\Rightarrow\) seperate GPU, small val set, infrequent validation = 해결책
- additional memory to store best parameters (근데 거의 신경 X)
- Early Stopping vs Weight Decay
Early Stopping Weight Decay minimize \(E_{in}\) only minimizes both \(E_{in}\) and \(\Omega (w)\) monitors \(E_{va}\) to stop \(\Rightarrow\) auto-determines correct amount of regularization requires many training experiments with different hyperparameters
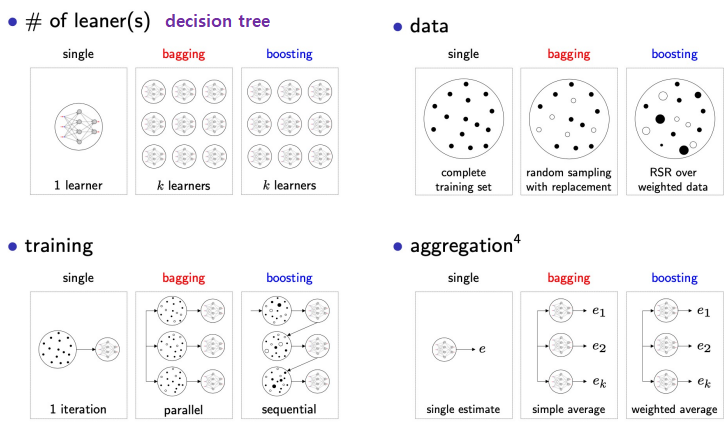
3. Ensemble Methods
make strong model by combining weak models
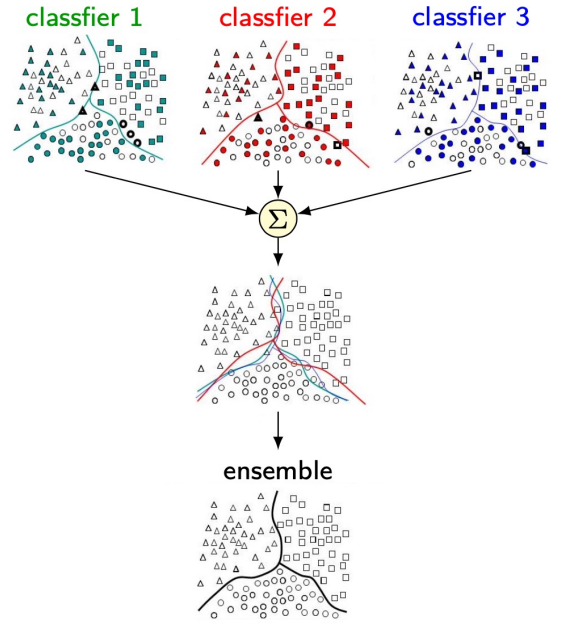
- aka ‘model averaging’
- strong: better bias/variance/accuracy
- Assumption:
- (i) Different models \(\rightarrow\) different random mistakes
- (ii) Averaging Noise \(\rightarrow\) 0
- (weighted) voting
-
Bagging - bootstrap aggregating 의 약자
- improve model’s variance but not bias
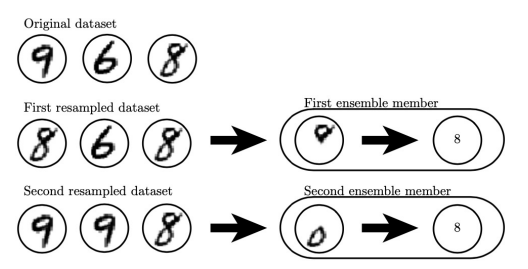
- train seperately \(\Longrightarrow\) combine outputs by averaging
- make \(k\) different datasets (random sampling)
- reduce same model/training algo/obj function \(\Rightarrow\) training different models
-
Boosting
- constructs an ensemble with higher capacity than individual models
- meta-algo for primarily reducing bias & variance
- most famous:
AdaBoost
- train multiple weak learners sequentially to get stronger learner
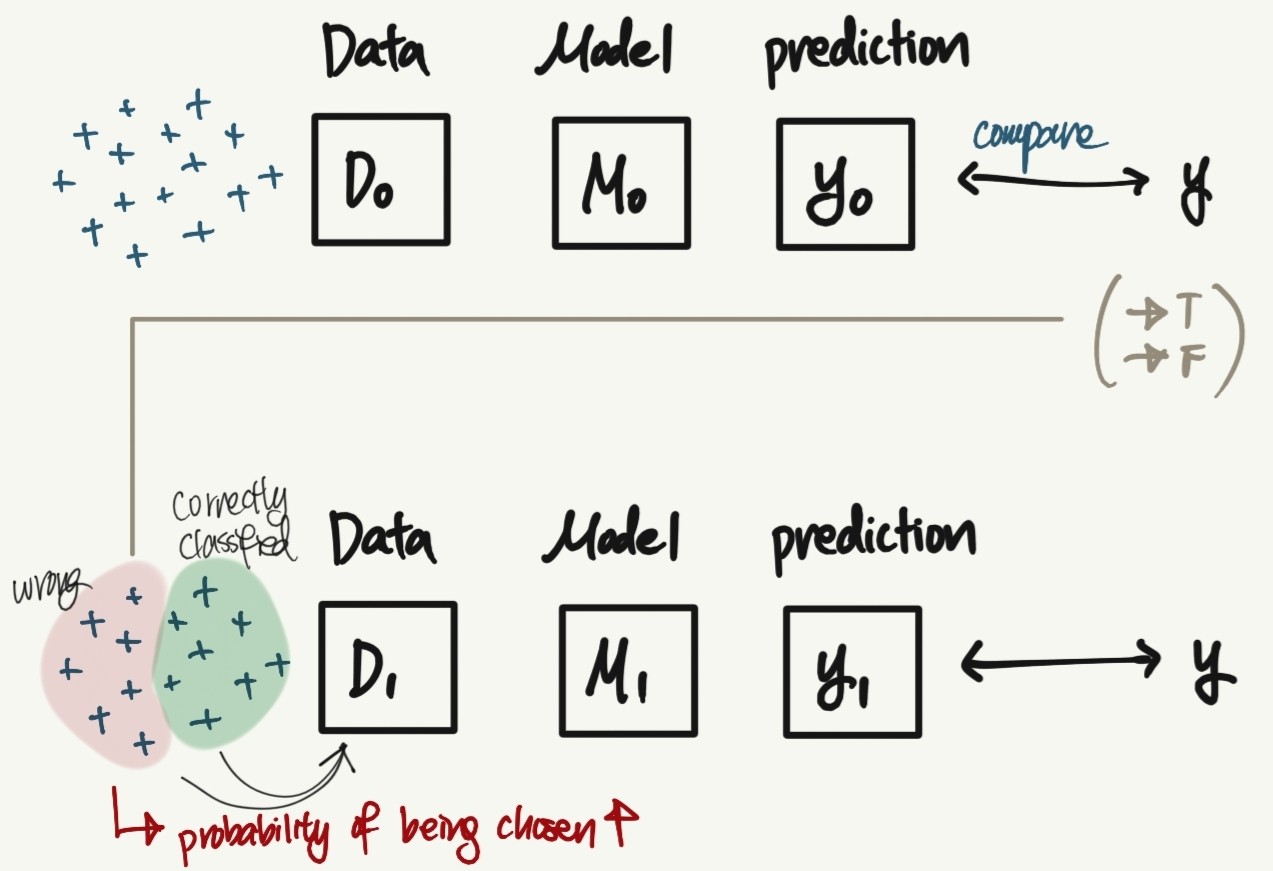
- future learners: 잘못 분류한 데이터에 더 집중함 (by reweighting training examples with prev learning results)
- boosting in NN:
- incrementally add Neural Nets to the ensemble
- incrementally add hidden units to Neural Nets
- model ensembles: extremely powerful, famous, widely used in papers, ML contests …etc
- typically gives about 2% extra performance
Questions
- sparse solution이 뭐냐 (l_1 regularizer)
- l1 l2 pro cons 정리하기
- eigenvalue 부분 … in weight decay
- lambda 클수록 omega 사용 불가? 이거 뭐지